
Saturday, 4 May 2013
ODSS Electric Car Build Part 4
Sunday, 21 April 2013
ODSS Electric Car Build Part 3
Progress on the car is continuing, albeit at a slow rate. The cage that protects the driver's legs and the batteries has been built, and one of the other team members is building the rear frame section, that will house the mounts for the rear wheel, motor, roll bar, and seat supports. While that is built, I'm working on the steering system up front. To minimize space, the steering will be done with two push rods instead of the conventional steering wheel. This is a much simpler system, which means it can be built much quicker.

The car will have a new motor, motor controller and battery monitor thanks to $1500 dollars that I've raised from several local sponsors, in return for ad placement on the body of the car. I calculated that we need $1500 because all together, the motor, motor controller and battery monitor cost around $1400. The car is split up into 5 ads that were soold to the sponsors. The motor is a MARSX, and it was specifically designed for small vehicle applications. The motor controller allows us to use a variable throttle on our car, while the battery monitor tells us important statistics, like how many amps the batteries have left, how much we're currently drawing, etc.




The car will have a new motor, motor controller and battery monitor thanks to $1500 dollars that I've raised from several local sponsors, in return for ad placement on the body of the car. I calculated that we need $1500 because all together, the motor, motor controller and battery monitor cost around $1400. The car is split up into 5 ads that were soold to the sponsors. The motor is a MARSX, and it was specifically designed for small vehicle applications. The motor controller allows us to use a variable throttle on our car, while the battery monitor tells us important statistics, like how many amps the batteries have left, how much we're currently drawing, etc.
Friday, 5 April 2013
ODSS Electric Car build Part 2
Work on the electric car is coming along at a steady pace. So far we've bolted on the sheet metal floor, as well as supports for the seat and batteries. We're also working on building two trapezoidal struts that will make up the top of the car's body. Once that is done, we'll build the arms that will hold the wheels, the roll bar, and the motor mounts for the back end.




Friday, 29 March 2013
Offroad Bumper: Mulligan
I've decided to restart the bumper I'm building for my truck. The main reason for this is that I've found a much better design online, which looks much better:


.JPG)


I can build this new bumper with metal twice as thin, but It will be even stronger, as the metal has a much stronger structure. I didn't really have a clear idea of what I was doing when I was building my first bumper attempt, and the fact that I had to build it at school meant that I didn't have a way of checking if the pieces I made fit properly.

The bumper will fit onto my truck by simply sliding onto the frame ends, and bolting in.
.JPG)
I'll be able to start building version 2 of my bumper once I get a working arc welder, and build a welding table. I've also made a 3d rendering of what my overall plans are for the truck.

Friday, 15 March 2013
Physics Projectile Motion Video
For a recent physics assignment about projectile motion, we were given 2 choices: we could build some kind of projectile launcher, or we could film an example of projectile motion, such as a soccer ball being kicked. In either case, we had to do a report. Originally, I felt like building something, but then I got the idea of filming a snowmobile jump. Not only was it fun for me to do, but it also gave me the chance to play around with movie editing, which I thoroughly enjoyed.
Here's the product of my work:
(You may want to skip the calculations, that part is somewhat dreary)
Here's the product of my work:
(You may want to skip the calculations, that part is somewhat dreary)
Saturday, 9 March 2013
ODSS Electric Car Build Part 1
For the next couple of months, I will be documenting the progress of the ODSS electric car team as we build a new car. Our goal is to go from the simple frame that we have now, to a fully built car by the May 24 weekend, the date of the competition.
.JPG)
So far, we took an old aluminum frame that we had from a previous car, and trimmed off several pieces of it to give us a nice simple chassis to build off of. The plan for this car is to have a simple set-up, but with as little wasted space as possible. This was one of the main drawbacks of our previous cars.
.JPG)
After the chassis was modified, we cut out a panel of sheet metal for the floor. We haven't used sheet metal as a floor before, but this time we're trying it instead of plywood to help conserve weight. This will also help if we drive in wet conditions, as plywood would act like a sponge, soaking up water and adding massive weight to the car.
Tuesday, 19 February 2013
Coilguns 101
Over the past few months, I've been doing quite a bit of research into coilguns and how the work, so I thought I'd do a write-up on them.
When a conductive wire, such as copper wire, is rolled up into a coil, and an electric charge is applied to it, it creates an electromagnetic field. The higher voltage applied to it, the larger the field. This means that a metal object will be pulled towards the coil with more force if more voltage is put through the coil.

A coilgun operates with this basic principle. The copper coil is wrapped around a plastic barrel(it doesn't have to be plastic, just a material that doesn't conduct electricity). Then, a very large charge is released into the barrel over a very short period of time, creating a quick but extremely powerful magnetic field. When a bullet is placed in the barrel, a short length behind the coil, the magnetic field pulls it towards the coil with great force, causing the bullet to fly down the barrel with great speed.

The large burst of energy required for the coil is generated with the use of a capacitor. a capacitor is much like a battery, in that it stores energy. However, a capacitor can release it's energy much faster than a battery. So if a high voltage capacitor fully charged, then connected to a coil, it will release all the energy into the coil very quickly.

When talking about coilguns, you may hear the term 3 stage, or sometimes 3 phase. This simply means that multiple coils are used to keep the bullet at constant acceleration down the barrel.
Testing the Analog Inputs
The 4 inputs on the SSC-32 card can be used in 2 different ways: Digital and Analog. We have already used the first in the last post and now we will try using them in Analog mode.
 To do this, we need a Potentiometer (or “Pot”) as shown in the diagram from the SSC-32 manual.
To do this, we need a Potentiometer (or “Pot”) as shown in the diagram from the SSC-32 manual.
A potentiometer is basically an adjustable resistor, so the as you turn the dial on it, the resistance acting on the electricity moving through it increases or decreases.
We used the ohmeter to check the resistance of the pot by measuring across the two outside connectors. The meter showed that this was a 25K ohm pot and when we adjusted it, the reading didn't change, confirming we had the correct leads.

We then tried reading the resistance across the center and outside leads and found it varied as we turned the handle.
 We then connected up the three leads of the pot to the “+” (5 volts), “-” (ground) and “A” (the first analog input) pins of the SSC-32 card using the breadboard. We also connected leads to the “A” and “-” pins so that we could monitor the voltage being given to the “A” input as we adjusted the potentiometer. The connections are shown below:
We then connected up the three leads of the pot to the “+” (5 volts), “-” (ground) and “A” (the first analog input) pins of the SSC-32 card using the breadboard. We also connected leads to the “A” and “-” pins so that we could monitor the voltage being given to the “A” input as we adjusted the potentiometer. The connections are shown below:

With the pot adjusted to 5 Volts we used the terminal program to send a “VA” command to check the value of the “A” input which came back with “FF” or 255 in decimal. Note that the first 3 bytes (56 41 0D) are the “V”, “A” and carriage return we typed in.
 Note that the initial “VA” command did not give the correct value because one dummy command at the beginning is required to change the input from digital to analog mode. We then adjusted the pot to 0 Volts and tried the command again:
Note that the initial “VA” command did not give the correct value because one dummy command at the beginning is required to change the input from digital to analog mode. We then adjusted the pot to 0 Volts and tried the command again:

This time the response was “00” or 0 decimal.

We then calculated what the response should be if the voltage was set to 3 volts:
 If measuring the value correctly, the response to the “VA” command should be 3 volt/ 5 volt * 255 or 153 decimal which is “99” in hex. When we tried it we got the correct result!
If measuring the value correctly, the response to the “VA” command should be 3 volt/ 5 volt * 255 or 153 decimal which is “99” in hex. When we tried it we got the correct result!
 We also tested the other 4 inputs pins by tying them to either Ground or 5V. They can all be queried at the same time using the “VA VB VC VD” command which returns 4 bytes instead of 1.
We also tested the other 4 inputs pins by tying them to either Ground or 5V. They can all be queried at the same time using the “VA VB VC VD” command which returns 4 bytes instead of 1.
Now that we know they work, we can connect the compound eye to these inputs. The eye is actually connects to 4 input pins, one for each direction around it(up, down, left, right). It also has two other pins, one to power the receivers, and one to power the emitters.
We then tried reading the resistance across the center and outside leads and found it varied as we turned the handle.
With the pot adjusted to 5 Volts we used the terminal program to send a “VA” command to check the value of the “A” input which came back with “FF” or 255 in decimal. Note that the first 3 bytes (56 41 0D) are the “V”, “A” and carriage return we typed in.
This time the response was “00” or 0 decimal.
We then calculated what the response should be if the voltage was set to 3 volts:
Now that we know they work, we can connect the compound eye to these inputs. The eye is actually connects to 4 input pins, one for each direction around it(up, down, left, right). It also has two other pins, one to power the receivers, and one to power the emitters.
Sunday, 17 February 2013
New Parts
After a bit of a delay, the parts we ordered from Robot Shop have finally arrived! We received a new servo motor for the grabber on the arm to replace the old one that is not working correctly (the internal gears are worn and it has a greatly reduced range of movement), a collection of wires to connect the SSC-32 inputs and the Raspberry Pi to the breadboard, and two circuit boards so we can connect them together and to the sensors.

The circuit on the left is a Logic Level converter. The main purpose of it is to take signals from one voltage, and convert them to another. This is vital, as the infra-red sensor operates at a different voltage than the SSC-32 and Raspberry Pi.

The board on the right is Dagu Compound Infrared Sensor. The bulbs in the middle emit rays of infra-red light, and the black sensors measure the response time. If something is in front of the sensor, the rays will reflect off of it, and the response time will be quicker. This allows the sensor to detect objects up to 20cm away. We can use this on our robot to follow a person, detect obstacles, or help to position the arm when picking up an object.
Wednesday, 13 February 2013
Lift kits 101
Currently, I've been doing some research into buying a lift kit for my truck, and I've noticed a lot of confusion among people in the same situation. I'd thought I'd help by writing down everything I've learned so far.

First and foremost, there are two basic types of mainstream lift kits:
Body Lifts
Body lifts lift up a vehicle by simply using blocks to lift the body of the vehicle off the frame. This makes body lifts incredibly cheap, simple, and easy to install. However, they offer almost no performance improvements.
This means that body lifts are really designed for people looking to get a slightly lifted look, or to make room for bigger tires, without spending lots of money. It would be extremely uncommon to find a body lift kit bigger than 3 or 4 inches.
 |
| An example of a body lift kit. |
Suspension lifts
Suspension lifts are the real deal. Anyone serious about off road performance should get a suspension lift. They lift a vehicle by replacing and adding key parts of a vehicles factory suspension system. These new parts lower down the wheels from the frame, and allow bigger shocks. This allows the addition of bigger tires, and more wheel travel, which is how much the wheel can move up and down. |
| An example of a suspension lift kit. Note the bigger shocks. |
The suspension lift kit that I am planning to buy is produced by a company called Race Car Dynamics, and offers 5" of lift. The main reason I'm interested in it is that it has received extremely positive reviews from many people, and it adds additional equipment that other kits don't, such as traction bars, which act as a brace between the rear axle and the frame, and high quality Bilstein shocks.
 |
| What the RCD 5" Lift looks like installed. |
Friday, 8 February 2013
The S-Motorworks Centurion
This is a model I made over the course of several months, during my design class. Being the only student taking grade 12 design during that semester, my teacher basically gave me a carte-blanche for my course outline. My task was to simply research a sector of design(architecture, automotive, aircraft, etc) and design a product. I chose automotive, and decided to try designing a rugged, heavy duty, off road cargo hauler vehicle, which I dubbed the Centurion.
 I started by designing the wheels, along with a simple driveline system and frame. After much research, I discerned that the best suspension set up for all-terrain travel is that of the Mercedes-Benz Unimog. The Unimog uses a portal axle system, where the axle meets the wheel hub at a higher point than the wheel's center, then turns a gear which turns the wheels. This gives the vehicle a very large ride height, without endangering stability.
I started by designing the wheels, along with a simple driveline system and frame. After much research, I discerned that the best suspension set up for all-terrain travel is that of the Mercedes-Benz Unimog. The Unimog uses a portal axle system, where the axle meets the wheel hub at a higher point than the wheel's center, then turns a gear which turns the wheels. This gives the vehicle a very large ride height, without endangering stability.

After that, I attempted to build the body. My first try was to give it very modern styling, but to my disappointment, I soon realized that it was far beyond my skill level. Here's a picture showing what it looked like when I gave up on modern styling.
 As you can see, it began to get very messy, and I realized that it would have taken me far too long to have a presentable product. So I decided to go for something a little more outlandish. I felt like doing something vintage, yet still somewhat advanced. Basically, I smashed together a 1920's truck with a 1960's bulldozer, then threw in some elements of an armored car.
As you can see, it began to get very messy, and I realized that it would have taken me far too long to have a presentable product. So I decided to go for something a little more outlandish. I felt like doing something vintage, yet still somewhat advanced. Basically, I smashed together a 1920's truck with a 1960's bulldozer, then threw in some elements of an armored car.

I was fairly pleased with this, but sadly, I had to stop working on it, because our teacher went on a leave of absence for the the remaining months of the semester, and a substitute tech teacher was put in place. As a result, I had to work on a different project instead, so it would be easier for the new teacher to mark. My hope is to one day finish this, or possibly even return to the original modern body style.


After that, I attempted to build the body. My first try was to give it very modern styling, but to my disappointment, I soon realized that it was far beyond my skill level. Here's a picture showing what it looked like when I gave up on modern styling.


I was fairly pleased with this, but sadly, I had to stop working on it, because our teacher went on a leave of absence for the the remaining months of the semester, and a substitute tech teacher was put in place. As a result, I had to work on a different project instead, so it would be easier for the new teacher to mark. My hope is to one day finish this, or possibly even return to the original modern body style.
My Grade 12 Design Project
I just thought I'd share the presentation I recently made for a design course I took last semester. We were told to imagine that the year is 2025, and the town of Orangeville has expanded to 3 times it's current size (2013). We were told to predict how it would expand, and then design 3 different public transit systems that could be used in Orangeville. We were also told to make our systems as environmentally friendly as possible. To make all of the 3D models, I used Google Sketchup.

If you would like to view it, just click here. I'm not the kind of person to brag, but my teacher told me it was the best presentation he'd ever seen.

If you would like to view it, just click here. I'm not the kind of person to brag, but my teacher told me it was the best presentation he'd ever seen.
Thursday, 24 January 2013
Robotics: Receiving External Input
The SSC-32 controller card has 4 pairs of pins that can be used to receive input signals from external devices. These are marked “A”, “B”, “C” and “D” and are beside the Baud rate setting for the serial port.

These inputs can be connected to switches and sensors to provide feedback on the positioning of the servos. For example, we can put a simple switch across the “D” pins at the end, and send a “D” or a “DL” message to the SSC-32, to get a message back that tells us whether the switch is open (ASCII “0” or 48) or closed (ASCII “1” or 49).
To test this we just created another a simple program with a timer called "checkSensor". It works much like our other program, and simply sends the "D" command to check what state the D pins are in(open or closed). This program just logs the state of the input (either 48 or 49) every fifth of a second. Normally the output logs 49, but when we shorted the two pins together for a couple of cycles, the output changed to 48. It change back to 49 when we stopped shorting out the pins.


We also tried changing the input from "D" to "DL". The difference between the “D” and the “DL” command is that the DL command is a latch. This means that once that switch opens, it will continue to return the symbol for 'open' until it is reset. The D command simply returns the open symbol only when the switch is open.

When we ran this version of the program, we had to change the timer to fire every 3 seconds so we could see how it worked. When we shorted the input pins, the value being returned switched from 49 to 48, and it didn't switch back, meaning that the latch was successful.
A latch could be used in a moving robot to detect if hits a wall. For instance, if a robot is moving at a certain speed, then hits a wall, it might bounce off. This could happen in between sensor checks the computer makes, which means the robot won't register it, and hit the wall again. A latch, however, will only allow the computer to hit a wall once, thereby avoiding possible damage to the robot.
Tuesday, 15 January 2013
ODSS Electric Car Team
For the previous years at my school, I have taken part in the electric car team. The purpose of the team is to design and build efficient electrical race cars. Generally, each year we revamp or scrap one of the older cars we have, and build a new car, with improved and refined technology.
Overall, I have highly enjoyed being part of the team, and have learned quite a lot about design and innovation from it. It has given me a large understanding about the design process, and taught me skills that I will be able to carry with me throughout my life.
Near the end of the school year, there are several competitions that allow us to compete with other high schools. There are 2 events that take place: the 12 volt race, and the 24 volt race. In the 12 volt, each car must draw power from a single 12 volt car battery, and complete as many laps as possible within one hour. The car that completes the most laps wins. In the 24 volt, each car is powered by 2 car batteries, and as such, the cars have plenty more power and lifetime, making a skilled driver much more important. Speeds in the 24 volt can reach up to 70km/h. In 2010, 11 schools from eight different school boards visited ODSS for this year’s annual electric car competition, which will test the distance traveled by each vehicle in 12-volt and 24-volt competitions. In 2009, Mr.Weishar, our teacher and team leader said the 24-volt winning car covered 38 kilometers in an hour while the 12-volt winning car traveled about 31 clicks.
 |
In this picture here, from 2010, you can see 3 of the cars built by our team. In the front, number 64, is one of the older models we have. It has a Styrofoam and fiberglass body and focused on maximum aerodynamics. That car is currently being revamped to more advanced standards this year. The next car, in the middle of the shot, number 21, was a successful experiment, in that we made the car as small and as agile as possible. The steering control was the same as an ATV, as in a handlebar that gave the driver more leverage than a steering wheel. That car has done quite well in competitions, all though it has the tendency to roll over at high speeds. Finally(and in the picture below), in the very back is the car we affectionately named 'The Tank'. The idea behind it was to have a heavier body, with a much stronger motor. We found it to be quite troublesome to build, quite hard to control, and overall severely sluggish. as such, it was scrapped for parts at the end of that year. The car that was built in 2011 is of course not shown here, but I'll mention it anyways. It uses a very smart boost power system, where a smaller motor powers the car around turns and other situations that call for agility, but on straightaways, the driver activates a much larger motor for a very powerful speed boost. So far, it has placed fairly high in the competitions it raced in.
 |
The Team was featured in the local paper during
the 2010 competition that took place in Orangeville
|
Overall, I have highly enjoyed being part of the team, and have learned quite a lot about design and innovation from it. It has given me a large understanding about the design process, and taught me skills that I will be able to carry with me throughout my life.
Wednesday, 2 January 2013
Raspberry Pi and Robot Plans
 Allow me to show you the Raspberry Pi. It's a very capable computer for its size, just a bit larger than a credit card. The point of it is to introduce programming to kids, to help them build fundamental skills for a career in software engineering. The problem that the makers of this found was that kids were entering post-secondary education with less and less understanding of computers and software. Previously, kids would learn about computers by playing around with simple platforms like the Commodore 64. So the Raspberry Pi was created, a small computer built specifically for hobbyist programming. At its heart is a ARM11 chip, which gives it roughly the same computing power as a first generation Xbox or Playstation. It has 2 usb ports, one for a keyboard and one for a mouse, a lan socket, a mini usb plug to power it with a 5V power source, an RCA and HDMI port for video, and a SD-card slot that it uses for memory.
Allow me to show you the Raspberry Pi. It's a very capable computer for its size, just a bit larger than a credit card. The point of it is to introduce programming to kids, to help them build fundamental skills for a career in software engineering. The problem that the makers of this found was that kids were entering post-secondary education with less and less understanding of computers and software. Previously, kids would learn about computers by playing around with simple platforms like the Commodore 64. So the Raspberry Pi was created, a small computer built specifically for hobbyist programming. At its heart is a ARM11 chip, which gives it roughly the same computing power as a first generation Xbox or Playstation. It has 2 usb ports, one for a keyboard and one for a mouse, a lan socket, a mini usb plug to power it with a 5V power source, an RCA and HDMI port for video, and a SD-card slot that it uses for memory.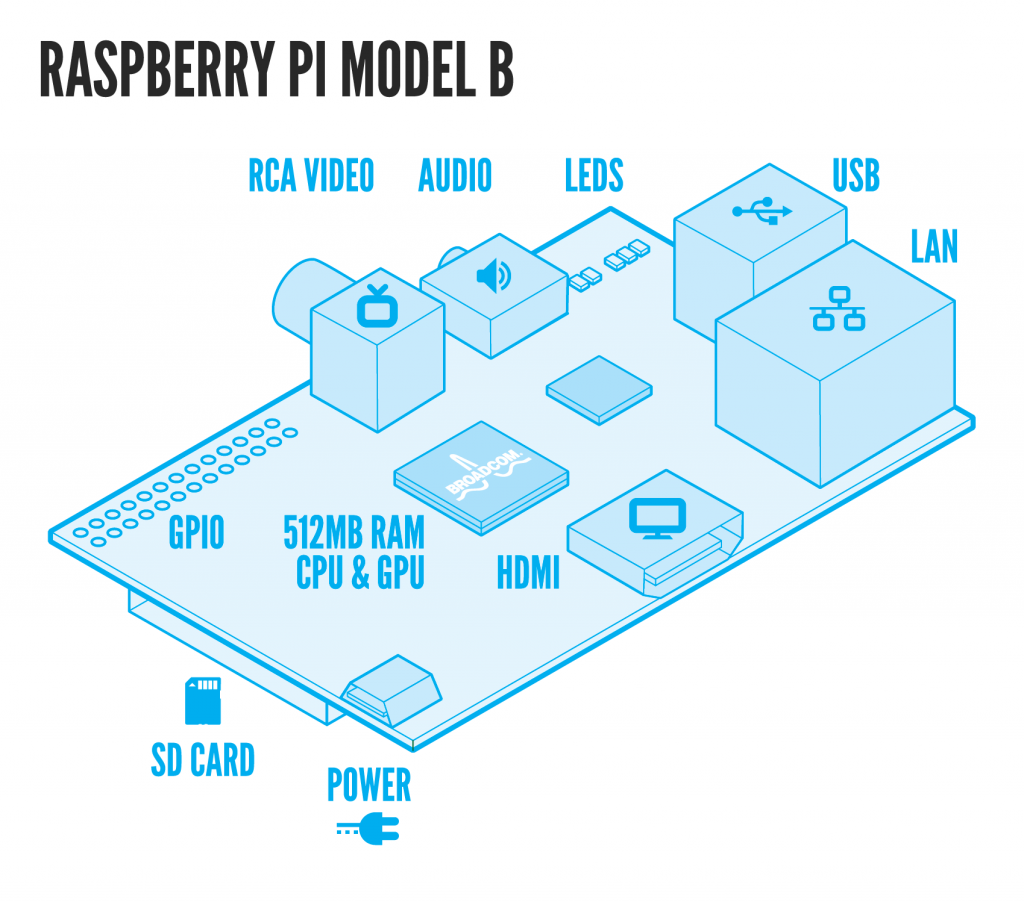
My plan for the Raspberry Pi is to combine it with my robot arm to give it some autonomous abilities. The Pi appears to have the necessary features to communicate with the arm, and if it could be put on a chassis along with the arm, then we it would be able to roam around without the need to be connected to the stationary mac. We could write simple programs that would allow the arm to move around and interact with it's environment, such as picking up an object, or moving through a cluttered space by moving debris out of the way. We have also purchased an infra-red sensor, that can be used as a type of electronic eye that the robot can use to judge distances, as demonstrated by this video:
For the actual frame of the robot, I was planning to make the simple chassis out of wood or lego, big enough to hold the robot arm, Raspberry Pi, a breadboard to connect the two, and the power systems, which will consist of a battery and circuitry to power the SSC-32 card the Raspberry Pi and the servos at the voltages they require. Initially we can just provide power via a cable to the AC power supply. We will also have to figure out how to make a serial data connection between the Raspberry Pi GPIO pins to the TTL Serial Port on the SSC-32 because they are different voltages. I want the robot to look a bit cleaner than just a chassis covered in wires and circuit boards, so I would like to use thin sheet metal to build an outer shell for it, to give it a more professional look.
Subscribe to:
Comments (Atom)