 Allow me to show you the Raspberry Pi. It's a very capable computer for its size, just a bit larger than a credit card. The point of it is to introduce programming to kids, to help them build fundamental skills for a career in software engineering. The problem that the makers of this found was that kids were entering post-secondary education with less and less understanding of computers and software. Previously, kids would learn about computers by playing around with simple platforms like the Commodore 64. So the Raspberry Pi was created, a small computer built specifically for hobbyist programming. At its heart is a ARM11 chip, which gives it roughly the same computing power as a first generation Xbox or Playstation. It has 2 usb ports, one for a keyboard and one for a mouse, a lan socket, a mini usb plug to power it with a 5V power source, an RCA and HDMI port for video, and a SD-card slot that it uses for memory.
Allow me to show you the Raspberry Pi. It's a very capable computer for its size, just a bit larger than a credit card. The point of it is to introduce programming to kids, to help them build fundamental skills for a career in software engineering. The problem that the makers of this found was that kids were entering post-secondary education with less and less understanding of computers and software. Previously, kids would learn about computers by playing around with simple platforms like the Commodore 64. So the Raspberry Pi was created, a small computer built specifically for hobbyist programming. At its heart is a ARM11 chip, which gives it roughly the same computing power as a first generation Xbox or Playstation. It has 2 usb ports, one for a keyboard and one for a mouse, a lan socket, a mini usb plug to power it with a 5V power source, an RCA and HDMI port for video, and a SD-card slot that it uses for memory.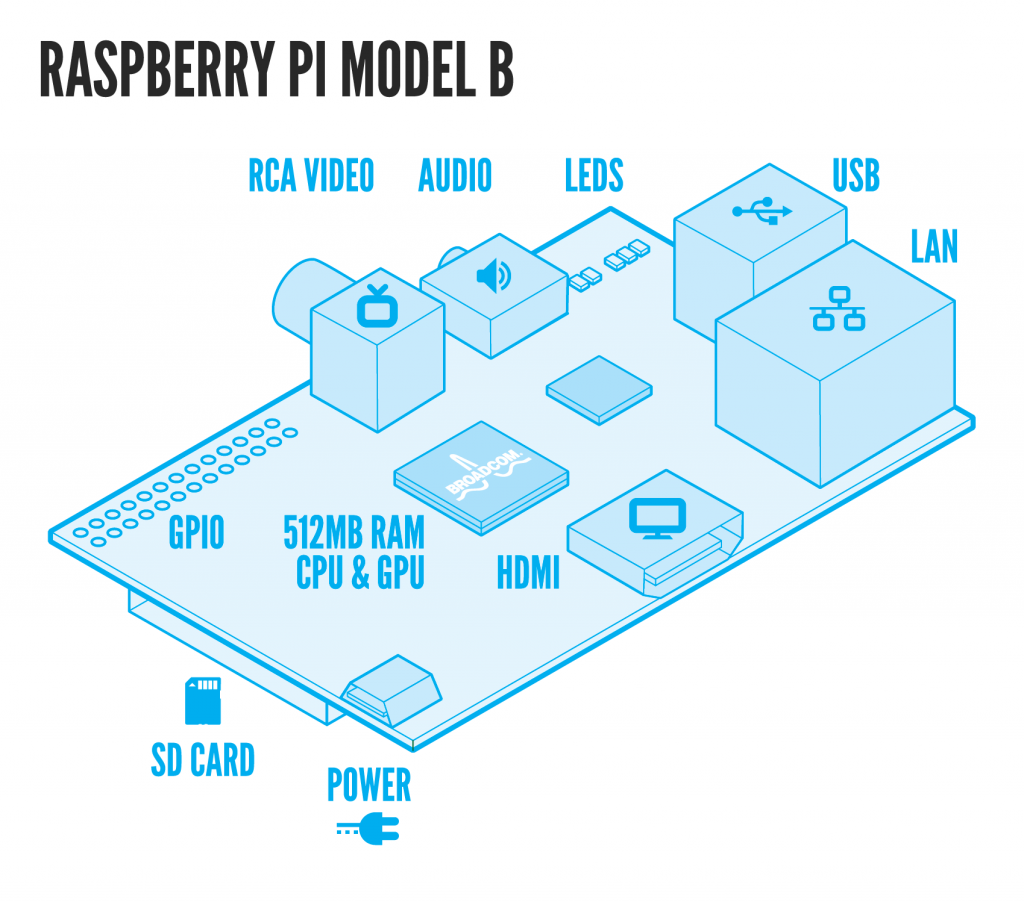
My plan for the Raspberry Pi is to combine it with my robot arm to give it some autonomous abilities. The Pi appears to have the necessary features to communicate with the arm, and if it could be put on a chassis along with the arm, then we it would be able to roam around without the need to be connected to the stationary mac. We could write simple programs that would allow the arm to move around and interact with it's environment, such as picking up an object, or moving through a cluttered space by moving debris out of the way. We have also purchased an infra-red sensor, that can be used as a type of electronic eye that the robot can use to judge distances, as demonstrated by this video:
For the actual frame of the robot, I was planning to make the simple chassis out of wood or lego, big enough to hold the robot arm, Raspberry Pi, a breadboard to connect the two, and the power systems, which will consist of a battery and circuitry to power the SSC-32 card the Raspberry Pi and the servos at the voltages they require. Initially we can just provide power via a cable to the AC power supply. We will also have to figure out how to make a serial data connection between the Raspberry Pi GPIO pins to the TTL Serial Port on the SSC-32 because they are different voltages. I want the robot to look a bit cleaner than just a chassis covered in wires and circuit boards, so I would like to use thin sheet metal to build an outer shell for it, to give it a more professional look.
No comments:
Post a Comment